Doctoral Research Summary
Self-sustainability of Multi-Robot Systems (MRS) in long term autonomous applications involving minimal to no human supervision
Research: Robot survivability in long term autonomous search and rescue, surveillance, monitoring operations to remote locations with minimal to no human supervision.
|
Keywords:
|
Multi-agent systems, Human-robot Interaction, Bio-inspired Robotic Systems;
Resource sharing, Group survival, Collaboration on tasks etc. |
Bio-inspired Self-organization in Multi-robot Systems (MRS)
Huddling behavior of Emperor Penguins in the Antarctic
|
Every winter, thousands of Emperor Penguins (Aptenodytes forsteri) in the Antarctic travel long distances inland to their breeding colonies and survive one of the harshest environments on Earth together as a social group.
They huddle together in tight groups during storms and low temperatures to conserve and share body heat. Observations suggest a systematic position shuffling of the penguins occur in the group such that everyone gets an approximately equal opportunity to be in the center and none are left behind on the outside or the inside for too long. |
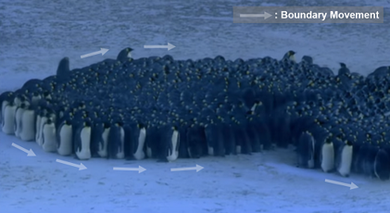
Huddling behavior and systematic flank movement of Emperor Penguins to survive long harsh Antarctic winters as a social group.
|
Proposed concepts for long term survival of MRS in the field:
Cyclic Energy Sharing and Distribution in a Structured Group
A convoy of heterogeneous mobile robots in formation traveling from point A to point B on a mission, suffers from its range being constrained by the highest battery using agent. An Emperor penguin-huddling inspired gradient based energy sharing and position shuffling scheme is proposed for heterogeneous multi-robot systems on the move, with the purpose of extending the working life of the entire convoy together. Each robot is modeled based on an Emperor penguin with carefully placed inductive coils for energy sharing with neighbors. The multi-robot system is built following the tightly packed hexagonal lattice formation for optimal charge sharing and a position coordination algorithm is proposed to allow all agents an equal opportunity to move to the center in turns which is shown to be the most advantageous position in the convoy.
|
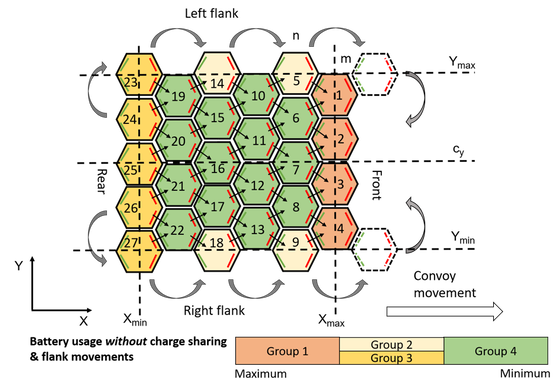
Illustrative representation of the PHS algorithm for structured MRS.
|
Surviving Damaging External Stimuli as a Group
Traditionally, research on mobile robot adaptability to damaging external stimuli has only focused on making individuals capable of surviving on their own, which is often very expensive and lacks robustness. We present our initial work on an Emperor Penguin huddling-inspired group survival methodology for a multi-robot system exposed to a damaging directional external stimulus. Individuals on the stimuli side are able to relocate to the safest location on the leeward side of the group in turns without any communication requirements or prior knowledge of the group size or shape, for prolonged survival of the group as a whole. A distributed boundary movement method is proposed with Gaussian Processes (GP) machine learning that allows individuals to relocate to the robot health-loss-rate global minima around the group boundary only using stimuli measurements.
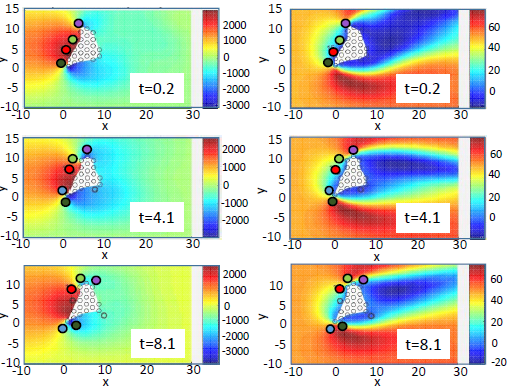
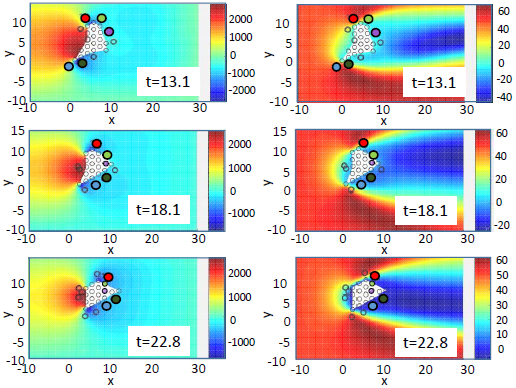
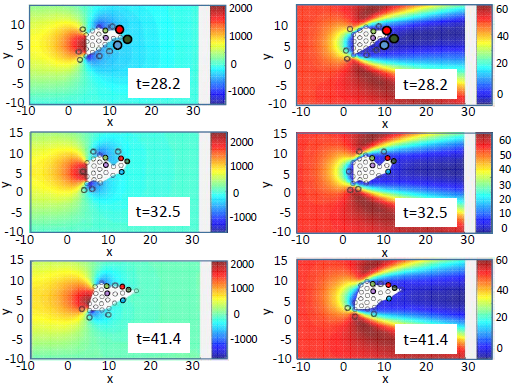
Simulation time-lapse for N = 26 robots exposed to a damaging directional stimuli along the x+ direction (Left column - fluid pressure distribution, Right column - fluid velocity distribution). The robots successfully move along the boundary from the damaging stimuli side to the leeward side of the group and settle at the health-loss-rate global minima determined by the proposed GP estimated global minima methodology.
Resource Distribution in MRS
|
|
In multi-agent systems, limited resources must be shared by individuals during missions to maximize the group utility of the system in the field. we present a generalized adaptive self-organization process for multi-agent systems featuring fast and efficient distribution of a consumable and refillable on-board resource throughout the group. An adaptive inter-agent spacing (AIS) controller based on individual resource levels is proposed that spaces out high resource bearing agents throughout the group including the group boundary extrema, and allows low resource bearing agents to adaptively occupy the in-between spaces receiving resource from the high resource bearing agents without overcrowding. The generalized approach of the self-organizing process allows flexibility in adapting the proposed AIS controller for various multi-agent applications.
|
Maneuvering Ability based Weighted Potential Field Framework for Multi-USV Navigation, Guidance and Control
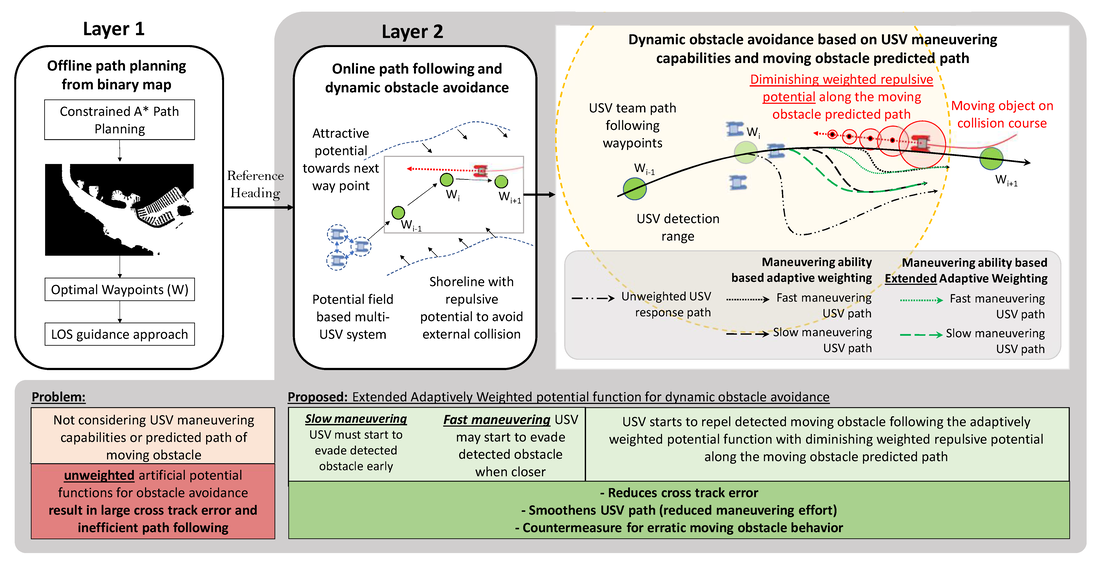
Numerous types of Unmanned Surface Vehicles (USVs) are currently available for different applications with a wide spectrum of maneuvering capabilities. We present a generalized multi-USV navigation, guidance and control framework adaptable to specific USV maneuvering response capabilities for dynamic obstacle avoidance. The proposed method integrates offline optimal path planning with a safety distance constrained A* algorithm, and an online Extended Adaptively Weighted (EAW) artificial potential field based path following approach with dynamic collision avoidance, based on USV maneuvering response times. The framework adaptively weighs inter-USV interaction, waypoint following, and collision avoidance based on USV maneuvering capabilities. The EAW system allows USVs with fast maneuvering abilities to react late and slow USVs to react sooner to oncoming moving obstacles gradually, with a carefully designed series of repulsive potential with diminishing weighting along the predicted path of detected moving obstacles, such that a smooth path is followed by the USV group with reduced cross-track error and reduced maneuvering effort. We emphasize the importance of such requirements in constrained and busy maritime environments such as narrow channels in busy harbors. Simulation results validate the proposed EAW artificial potential field framework for different sized multi-USV teams showing reduced cross-track error and maneuvering effort compared to the unweighted or traditional approach, for both slow and fast maneuvering multi-USV teams.
Task Allocation in Multi-human Multi-robot (MH-MR) systems
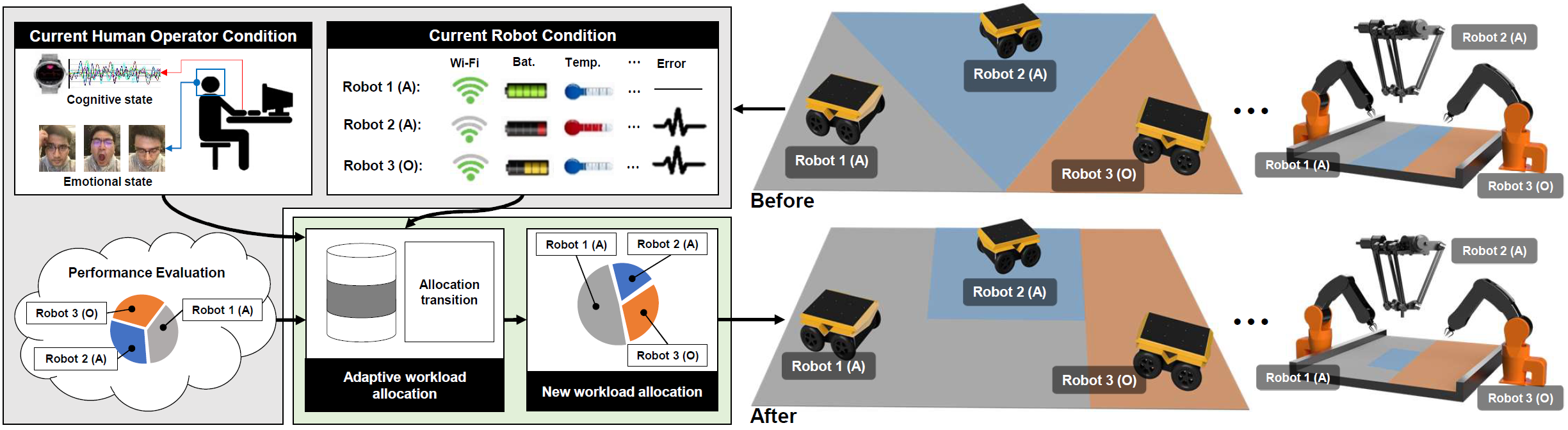
Multi-human multi-robot (MH-MR) systems have the ability to combine the potential advantages of robotic systems and humans in the loop. Robotic systems contribute with precision performance and long operation of repetitive tasks without tire, while humans in the loop enhance decision making abilities following improved situational awareness. The system’s ability to adapt to changing conditions and performance of each individual (humans and robots) during the mission is vital to maintaining overall system performance. Given the variety and operational scale of such a system, development of a generalized framework is pertinent. The research goal is to develop a generalized MH-MR system framework capable of allocating the system workload adaptively to health conditions and work performance of human operated and autonomous robots. The framework consists of removable modular blocks ensuring applicability to different MH-MR scenarios. A new workload transition block ensures smooth transition without adverse affects of the workload change on the individual agents.
Neighbor Support based Collaborative MRS applications
Shape Formation
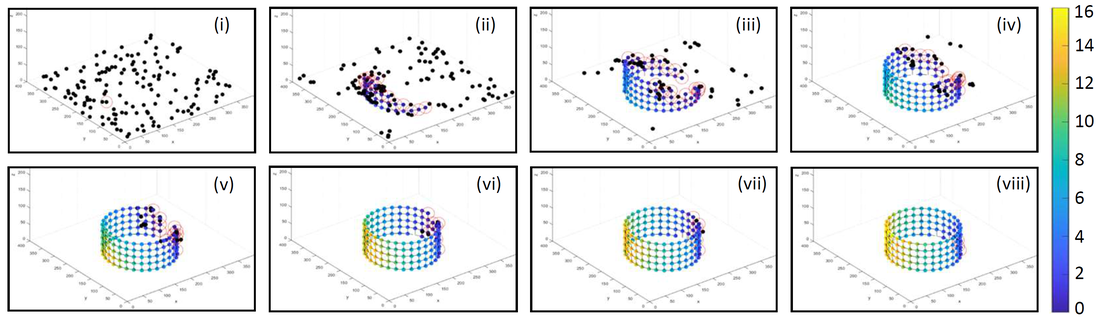
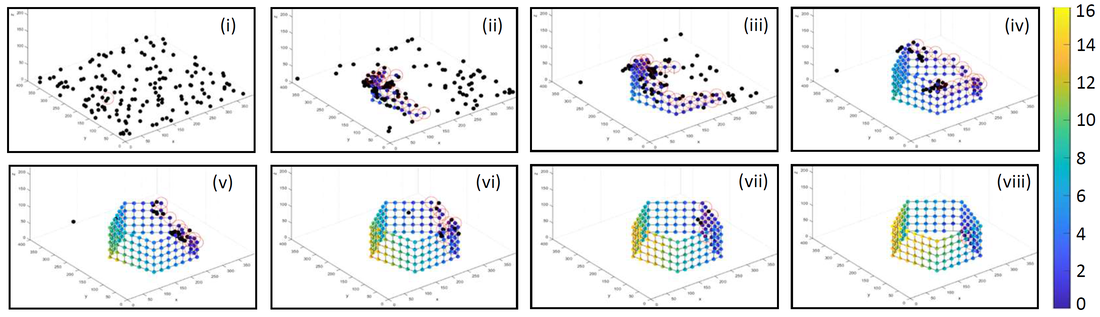
Timelapse of cylinder and pentagonal prism structure formation
Autonomous shape and structure formation is an important problem in the domain of large-scale multiagent systems. In this paper, we propose a 3D structure representation method and a distributed structure formation strategy where settled agents guide free moving agents to a prescribed location to settle in the structure. Agents at the structure formation frontier looking for neighbors to settle act as beacons, generating a surface gradient throughout the formed structure propagated by settled agents. Free-moving agents follow the surface gradient along the formed structure
surface to the formation frontier, where they eventually reach the closest beacon and settle to continue the structure formation following a local bidding process. Agent behavior is governed by a finite state machine implementation, along with potential field based motion control laws. We also discuss appropriate rules for recovering from stagnation points. Simulation experiments are presented to show planar and 3D structure formations
with continuous and discontinuous boundary/surfaces, which validate the proposed strategy, followed by a scalability analysis.
surface to the formation frontier, where they eventually reach the closest beacon and settle to continue the structure formation following a local bidding process. Agent behavior is governed by a finite state machine implementation, along with potential field based motion control laws. We also discuss appropriate rules for recovering from stagnation points. Simulation experiments are presented to show planar and 3D structure formations
with continuous and discontinuous boundary/surfaces, which validate the proposed strategy, followed by a scalability analysis.
Object Transportation
to be added
